TAPAS.network | 14 November 2022 | Commentary | David Metz
Self-driving cars - is all the Government attention justified?

Is the idea of autonomously-controlled private cars on normal roads either feasible or desirable – and should the government be cheer-leading this field of transport development, asks . Here he considers the technological, legal, regulatory and public benefit issues, and can’t find much of a case for spending either public money or private investment on the concept, except for perhaps offering new shared use transport solutions in carefully managed situations.
THE BRITISH GOVERNMENT has long been keen on encouraging the prospect of what were initially known as ‘connected and autonomous vehicles’ (CAV). In 2015 it set up the Centre for Connected and Autonomous Vehicles to stimulate the development of the technology and steered funds into the sector via the Transport Systems Catapult. Typical of recent bullish statements by DfT ministers is this from Grant Shapps, when Transport Secretary, earlier this year:
‘The benefits of self-driving vehicles have the potential to be huge. Not only can they improve people’s access to education and other vital services, but the industry itself can create tens of thousands of job opportunities throughout the country. Most importantly, they’re expected to make our roads safer by reducing the dangers of driver error in road collisions. We want the UK to be at the forefront of developing and using this fantastic technology, and that is why we are investing millions in vital research into safety and setting the legislation to ensure we gain the full benefits that this technology promises.’(1)
There’s no doubting the enthusiasm, but is this just hype, or is there a reality underpinning the vision? And what exactly is the vision anyway? It seems to be principally focussed on re-imagining the existing private car as a vehicle that no longer needs a driver behind the wheel, and which can whizz its occupants around in robotic mode, avoiding collisions and improving safety, whilst allowing the passengers to get on with other tasks, or simply enjoying the ride and the view – or maybe having a nap.

Trials of such driverless cars on public roads are taking place in a number of countries, mostly with a human ‘safety driver’ still on board, but this requirement has been dropped in some US and Chinese locations where traffic conditions are deemed favourable. Yet the prospects remain uncertain, so it is timely that the House of Commons Transport Committee has initiated an inquiry into self-driving vehicles(2).
I should say that I am specifically exploring here the prospects for such driverless cars ever becoming widespread, acceptable and effective in the foreseeable future. I’m not considering the possibilities of driverless multi-user pods or rapid transit buses on at least semi-segregated roads, where some deployment has already taken place. Nor do I discuss the scope for freight vehicles to operate in platoons on inter-urban motorways, where a recent UK trial found the hoped-for improvements in fuel use to be disappointing(3).
The government published a substantial policy document in August of this year entitled Connected and Automated Mobility 2025, jointly presented to Parliament by the Secretary of State for Transport and the Secretary of State for Business, Energy and Industrial Strategy(4).
Note that Automated has replaced Autonomous, perhaps reflecting a scaling down of expectation. Note also that Mobility has replaced Vehicles, hence CAM rather than CAV, a sensible but small generalisation. But note also the absence of reference to Connected within the new document: the whole emphasis is on automation of individual vehicles, with little mention of the possibilities of connectedness between vehicles. In this, the government is following the prevailing mindset of the automotive industry, tech start-ups as well as established vehicle manufacturers, who see autonomy easier to achieve than connectedness between vehicles of different manufacture and type.
The self-driving vehicle concept is seen as the application of CAM technologies with greatest commercial potential. But for deployment to happen, safety must be assured. So in 2018 the government asked the Law Commission to develop the legislative framework for a safety regime. The Commission’s final report, also published earlier this year, will be the basis of legislation that the DfT will bring forward(5).
Legal consequences
Because, to be useful, a self-driving vehicle will need to be able to drive itself for at least part of a journey, there are profound legal consequences. The human driver can no longer be the principal focus of accountability for road safety. Instead, new systems of safety assurance are needed, both before and after vehicles are allowed to drive themselves on roads. The legal framework has to cover both self-driving functions, where a user must be able to take over control when the vehicle cannot cope – for instance in poor visibility – as well as more advanced automation when the vehicle is able to cope under all conditions.
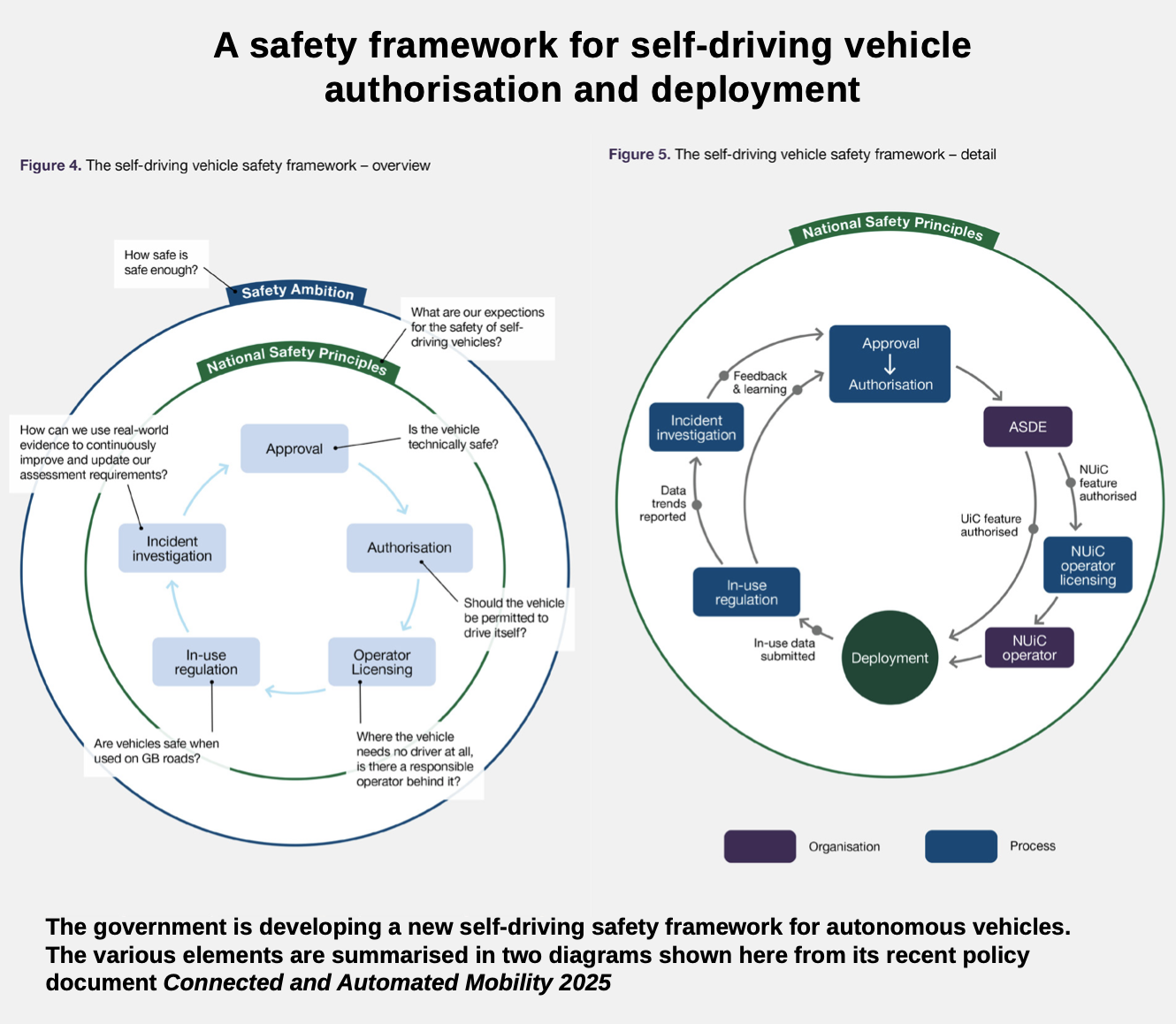
The Law Commission proposes three new legal actors: ● Authorised Self-Driving Entity (ASDE) – the vehicle manufacturer or software developer who puts a self-driving vehicle forward for authorisation to the regulator.
•User-in-charge (UiC) – the human in the driving seat while the vehicle is driving itself, who can take charge if the self-driving function cannot cope.
•NUiC operator, a supervisory system responsible when there is no user in charge, to navigate obstructions and deal with incidents. There will need to be regulators for new functions: ● Vehicle type approval. ● Authorisation to self-drive.
•In-use safety regulation.
•NUiC operator licencing.
The proposals of the Law Commission will need to be enacted in legislation, to make possible the government’s intention to make the UK an attractive place for the deployment of self-driving vehicles, even though the main development of the technology is taking place in the US, where there is considerable diversity of regulatory regimes across the states. However, the comprehensive legal framework may deter some prospective developers.
Ride-hailing operators such as Uber, who have aspirations for a driverless future, might hope to save the costs of the driver. But under the proposed regime they would need to own the vehicles and accept responsibility as the NUiC operator for oversight of operations, and possibly also to be the ASDE. This would be a large and costly change from the company’s current capital-light business model, where ownership of the vehicles lies elsewhere.
Electric vehicle maker Tesla’s approach to automation has meanwhile been to incorporate the hardware into existing privately-owned vehicles and to progressively improve the software over time to get to the point of implementing what is being marketed as ‘Full Self-Driving’ capability. Taken literally, this would also require Tesla to be licenced as a NUiC operator, with oversight of its whole fleet of vehicles on the road, which is hardly conceivable. So if they use the automated mode, Tesla drivers would need always to stay alert and be prepared to take charge in the event of the unexpected.

Safety
A key question in this discussion is the appropriate level of safety required for a self-driving vehicle. The Law Commission took the view that this is best decided by ministers, in the light of judgement of the public’s acceptance of risk. The view of the government, set out in the recent policy document, is that self-driving vehicles should be held to the same standard of behaviour as that expected in road traffic legislation for human drivers: ‘competent and careful’. This standard is higher than that generally enforceable now on the average human driver – who include, for example, drivers who are fatigued, distracted or under the influence of drink or drugs – despite this not being the behaviour that is expected of them.
The ‘competent and careful’ standard appears to be the minimum required politically. Anything less would hardly be publicly acceptable. But does it do the trick? On occasion, self-driving vehicles will inevitably be involved in crashes with fatalities. ‘Competent and careful’ implies that the self- driving vehicle could not be blamed. The fault would be attributed to the other drivers (‘human error’) or to vehicle- or road-related defects. Yet would it be possible to demonstrate such blamelessness in practice, when the other parties to the crash would be seeking to shift responsibility?
In Britain there is one fatality per 140 million miles driven, so deaths involving self-driving vehicles could be expected to be exceedingly rare events. But when they do occur, they will surely attract much public attention. As a result, there may well be pressure to tighten safety standards further, which, done in response to public anxiety, may undermine the general acceptability of self- driving vehicles. There is therefore a good case for a higher initial safety standard than ‘competent and careful’ to be set.
Benefits
The practical development of vehicle automation for general deployment is proving more difficult than the pioneering technology optimists had hoped. Apart from getting the technology to the point of being publicly acceptable, there is an evident need to develop viable business models consistent with the expected regulatory regime. And that means asking who will buy the vehicles? This in turn will depend on how purchasers perceive the benefits. In this regard, the practical benefits of vehicle automation remain unclear.
Proponents point up the safety benefits, especially in the United States where almost 39,000 people were killed in motor vehicle crashes in 2020, a fatality rate of 12 per 100,000 population, compared with 2.3 for the UK. Given that human error and risky behaviour is said to be responsible for 90% or more of fatalities, it would seem a reasonable expectation that the ‘robot driver’ of a self-driving vehicle could do better than fallible humans. On the other hand, robots suffer from their own shortcomings, tending to be less effective at perceptions involving high variability or alternative interpretations. In particular, robots would find it difficult to engage in the kind of visual negotiation that occurs between human drivers to settle which gives way when space is tight. Besides, the driving performance of a robot would need to be very similar – or better – than that of a human driver to ensure public acceptability. A self-driving vehicle that proceeded particularly cautiously to meet safety requirements could be unattractive to the purchasers, and an irritation to other road users. So the robot driver would effectively need to learn how to drive like a human.
Because self-driving vehicles would be capable of operating empty, for example when returning to base after dropping off the occupant, and thus not needing to pay to park, they could add to the traffic miles generated and hence to congestion.
Another claimed benefit is that automation might increase the capacity of existing roads by allowing these safety-conscious vehicles to move with shorter headways, that is, with a smaller distance between them than the recommended two-second gap on fast roads. The more precise control exercised by a robot might also smooth traffic flows and allow the use of narrower lanes. However, such increases in capacity would seem likely to be possible only on roads dedicated to self- driving vehicles, since the presence of conventional vehicles, not to mention cyclists, motorcycles and pedestrians, would require standard spacing to be maintained. In any event, in line with current experience, any increase in capacity would be expected to attract additional traffic, so that long term congestion relief would not be expected.
Automation that allowed an increase in road capacity might anyway be of interest to a road authority, as a public benefit, but not to individual vehicle owners if they had to bear the cost of the necessary technology. And what of parking this autonomous fleet? How would they be managed when ‘out of service’? Because self-driving vehicles would be capable of operating empty, for example when returning to base after dropping off the occupant, and thus not needing to pay to park, they could add to the traffic miles generated and hence to congestion. Conventional taxis operate without a passenger while seeking a fare, of course, but privately owned vehicles without occupants would be a new source of traffic. All this is before any consideration of how they would be licenced and the fee, and/or any road user charges they must pay – whether the same as, or different to, conventionally driven vehicles.
Prospects
One obvious problem of driverless vehicles is how they can happily enter the vehicle population alongside conventionally-driven vehicles. The prospects for widespread vehicle automation on existing roads with mixed traffic seem very uncertain. The driving task on motorways might be lessened in good visibility and in the absence of road works, but the driver would need to be immediately available to take control in adverse situations – and when going into general traffic. There are some low-speed environments that might accommodate driverless vehicles, including campuses, business parks and other new developments with extensive road space, and some such deployment has taken place; in these circumstances driverless shared-use pods could be a cost- effective transport technology. Yet it is hard to see driverless vehicles successfully negotiating historic towns and cities with complex road layouts, often narrow streets, extensive kerbside parked cars, cyclists and randomly moving pedestrians.
This impediment to automation in general traffic in urban areas is particularly relevant to the idea of driverless taxis that could be attractive to ride-hailing operators such as Uber, to avoid the cost of the human driver and spread the extra capital cost of the vehicle through intensive use. On the other hand, there would be the potential cost of ownership of fleets of automated taxis, rather than the current model of ride-hailing operators where drivers own their own vehicles. Besides, a driverless taxi system operator would need to exercise oversight of the activity of each vehicle in their fleet, to deal remotely with incidents and navigate obstructions, which would add to costs. It is certainly possible that the relatively unskilled human taxi driver in their own car may remain a lower cost option than the robot driver in a specially provided one.
The way forward thus remains unclear. Indeed, after more than a decade of development of autonomous vehicles, the early excitement and optimism have been followed by some disillusion as the problems of achieving and implementing an acceptably safe product have been recognised. The recent decline in the value of technology stocks and venture capital investments suggests that finance to support further development of vehicle automation may be harder to come by. Accordingly, it would be premature to predict the eventual outcome, both in timing and extent of deployment. Who can judge whether, as enthusiasts for the technology assert, children born today will not need to learn to drive a car?
The major transport innovations of the past have been those that made possible step-change increases in the speed of travel – the railway and the modern bicycle in the nineteenth century, the internal combustion engine for road vehicles and the jet engine for aircraft in the twentieth century. These step-change increases in speed, and thus reductions in journey times, permitted increased access to people and places, opportunities and choices, which were the benefits of harnessing the energy of fossil fuels for the motive power of mobility. In contrast, it is unlikely that automation would increase the average speed of travel on the existing road network, which is constrained by safety and congestion. Accordingly, the benefits of vehicle automation are much more likely to take the form of improved journey quality, and hopefully safety, and the possibility of doing other things whilst on the move – particularly those that have come with the digital information and communications era. It remains to be seen to what extent purchasers of driverless vehicles will be willing to pay for these benefits – or if they can achieve them by adapting to wider new mobility thinking in other ways, particularly at a time of changing inter-generational attitudes to the ownership of vehicles personally, and their use.
The UK government has been very supportive of vehicle automation, in particular aiming to put in place a comprehensive legislative regime based on the thorough analysis by the Law Commission. Yet there is only limited commercial development of the technology underway in Britain, so the benefits for both industrial and transport policy do not seem to be that great. A more important technology priority for road transport policy has surely to be the switch to electric propulsion and the quest for transport decarbonisation.
References:
-
https://www.gov.uk/government/news/self-driving-revolution-to-boost-economy-and-improve-road-safety
-
https://committees.parliament.uk/work/6795/selfdriving-vehicles/
David Metz is an honorary professor in the Centre for Transport Studies, University College London, where his research focuses on how demographic, behavioural and technological factors influence travel demand. He spent part of his career as a senior civil servant in a number of UK government departments, both as policy advisor and scientist, including five years as Chief Scientist at the Department of Transport. www.drivingchange.org.uk
This article was first published in LTT magazine, LTT857, 14 November 2022.
You are currently viewing this page as TAPAS Taster user.
To read and make comments on this article you need to register for free as TAPAS Select user and log in.
Log in